6.4200: Robotics, Science and Systems
Showcase: RSS 2025 Team 8 Website
Oh boy. This was an intense class. I’d say we ended up with a cool “portfolio” though!
From the course catalog: Presents concepts, principles, and algorithmic foundations for robots and autonomous vehicles operating in the physical world. Topics include sensing, kinematics and dynamics, state estimation, computer vision, perception, learning, control, motion planning, and embedded system development. Students design and implement advanced algorithms on complex robotic platforms capable of agile autonomous navigation and real-time interaction with the physical word. Students engage in extensive written and oral communication exercises.
Table of Contents
- Process Reference: Common commands / workflows / things (from old Reference)
- Rubrics: Condensed briefing and report rubrics.
- Lecture 1: Logistics, Introduction
- Lecture 2: Robot Architecture, Intro to ROS2
- Lab 1A/B: Intro to Linux/Git
-
Recitation 1: Consensus Decision-Making, Models for Teamwork/Decision-Making, Intro to Collaboration
- Lecture 3: Coordinate Frames & Transformations, Positions & Rotations
- Lecture 4: Poses & Rigid Transformations / ROS2 Implementation
- Lab 1C: Intro to ROS
-
Recitations 2–4: Ethics for Roboticists Activity
- Lecture 5: Basic Control Systems
- Lecture 6: More Control Systems (PID), Pure Pursuit for Steering Control
- Lab 2: Wall Follower in Simulation
-
Lecture 7: Control Applications, Actuation, Proprioceptive/Exteroceptive Sensors
- Lecture 8: Image Formation, Colors, Pinhole Camera Model
- Recitation 5: The Story, Briefing: Speakers & Slides, Lab 3 Briefing Intro
- Recitation 6: Report feedback
- Lab 3, Briefing/Report: Wall Follower on Racecar
- Lecture 9: Camera Calibration, Image Features, Corner/Descriptor/Line Detection
- Lecture 10: Color Segmentation, Template Matching, SIFT Object Detector, YOLO, Other Computer Vision Problems
-
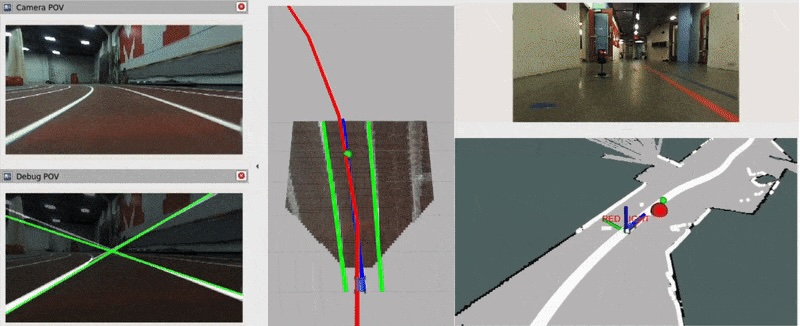
Lab 4, Briefing: Vision and Line Following
- Lecture 11: Perception & World Models, Maps, Localization Intro
- Lecture 12: Bayes Filter, Kalman Filter, Monte Carlo Localization (MCL) Intro
- Lecture 13: MCL Motion/Measurement Models and Showcase
- Lecture 14: Mapping, Simultaneous Localization and Mapping (SLAM), EKF-SLAM, Particle Filter SLAM
- Lecture 15: Maximum A Posteriori (MAP) Estimation for SLAM, MAP-based SLAM Without Landmarks
- Recitation 7: Visual Display and Data Design
-
Lab 5, Pset/Briefing/Report: MCL
- Lecture 16: Motion Planning Formalization, Grid-based Models
- Lecture 17: Configuration Space, C-obstacles (Convex Hull, Minkowski Addition), Motion Planning with Graphs
- Lecture 18: Randomized Methods (PRM), Differential Constraints: (RRT), RRT*/PRM*, Motion Planning Algorithm Comparisons
- Lab 6, Lab 6 Speed, Briefing/Report: Path Planning
-
Motion Planning: Advanced motion planning techniques (FMT*, Dubin curves, SEHS)
- Lecture 19: ML Applications, Regression & Classification
- Lecture 20: Neural Networks, Computer Vision with CNNs
- Lecture 21: Overfitting & Double Descent, Unsupervised/Imitation/Reinforcement Learning, RL Examples
- Final Challenge, Briefing: Shrink Ray Heist, Race to the Moon
- Lecture 22: Learning Visual Parkour, SLAM, Open Challenges
- Lecture 23: Hierarchical Planning, Imitation Learning, Engineering Reliable Systems